-
RadLoc: Radar-based 3-DoF Global Localization via Fast, Robust, and Lightweight Spatial Descriptor Across Diverse Environmental Scenarios
Hogyun Kim, Jiwon Choi, Jungwoo Lee, Younggun Cho
-
Commerge: Communication-Efficient, Robust and Fast LiDAR Map Merging Framework for Multi-robot Coordination in Resource-constrained Scenarios
Hogyun Kim, Jiwon Choi, Juwon Kim, Geonmo Yang, Seokhwan Jeong, Hyungtae Lim, Younggun Cho
-
KISS-IMU: Self-supervised Inertial Odometry with Motion-balanced Learning and Uncertainty-aware Inference
Jiwon Choi, Hogyun Kim, Geonmo Yang, Juhui Lee, Younggun Cho
ICRA, 2026
, 2026/06
·
Best Paper on Robot Perception Finalist
-
SKiD-SLAM: Robust, Lightweight, and Distributed Multi-Robot LiDAR SLAM in Resource-Constrained Field Environments
Hogyun Kim, Jiwon Choi, Juwon Kim, Geonmo Yang, Dongjin Cho, Hyungtae Lim, Younggun Cho
-
PoLaRIS Dataset: A Maritime Object Detection and Tracking Dataset in Pohang Canal
Jiwon Choi*, Dongjin Cho*, Giheyon Lee, Hogyun Kim, Geonmo Yang, Joowan Kim, Younggun Cho
-
IML-SLAM: 주행 차량 모션을 고려한 LiDAR-Inertial SLAM 시스템
Jiwon Choi, Hogyun Kim, Geonmo Yang, Younggun Cho
-
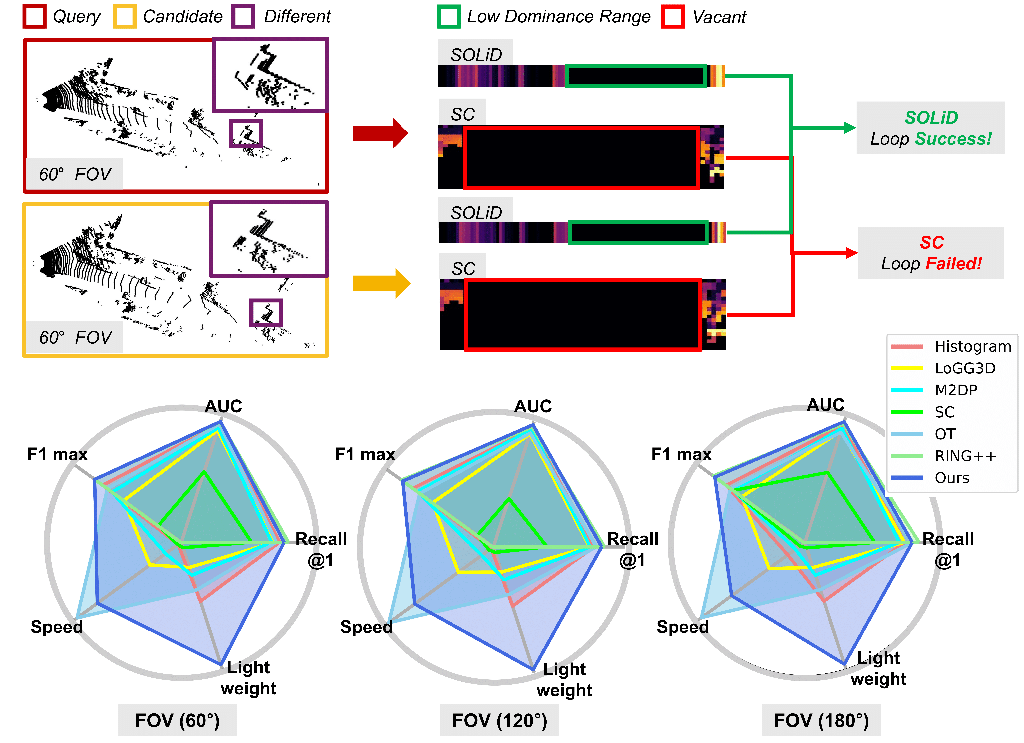
Narrowing your FOV with SOLiD: Spatially Organized and Lightweight Global Descriptor for FOV-constrained LiDAR Place Recognition
Hogyun Kim, Jiwon Choi, Taehu Sim, Giseop Kim, Younggun Cho
-
가벼운 전역 설명자로 이루어진 위치 인식 기술을 이용한 강인한 슬램 기술
Jiwon Choi, Hogyun Kim, Younggun Cho
-
Study on Efficient Multi-floor Navigation Using a Visual Marker and Floor Plan Map
Jiwon Choi, Taehu Sim, Gihyeon Lee, Jaeyong Lee, Gilhwan Kang, Hogyun Kim, Young Gun Cho
-
Visual marker 및 설계도면을 활용한 효율적인 다층 내비게이션에 관한 연구
Gihyeon Lee, Sangwook Han, Taehu Sim, Jiwon Choi, Changhee Kim, Jaeyong Lee, Younggun Cho
-
거리 기반 Sampling Algorithm을 이용한 LiDAR의 객체 인식 성능 개선에 관한 연구
Dongyoung Kim, Hanbin Song, Jiwon Choi, Jaewoon Lee, Jiung Im, Jonghun Won